#include <PhysicalEngine.h>
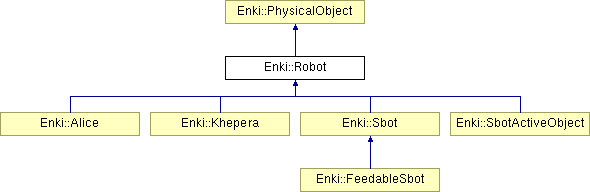
Inheritance diagram for Enki::Robot:
Public Member Functions | |
| Robot () | |
| Constructor. | |
| void | addLocalInteraction (LocalInteraction *li) |
| Add a new local interaction, re-sort interaction vector from long ranged to short ranged. | |
| void | addGlobalInteraction (GlobalInteraction *gi) |
| Add a global interaction, just add it at the end of the vector. | |
| virtual void | initLocalInteractions () |
| Initialize the local interactions, call init on each one, then call PhysicalObject::initLocalInteractions. | |
| virtual void | doLocalInteractions (World *w, PhysicalObject *po, double dt, bool firstInteraction) |
| Do the local interactions with other objects, call objectStep on each one, then call PhysicalObject::doLocalInteractions. firstInteraction controls which object interacts with which. | |
| virtual void | doLocalWallsInteraction (World *w) |
| Do the local interactions with walls, call wallsStep on each one, then call PhysicalObject::doLocalWallsInteraction. | |
| virtual void | finalizeLocalInteractions (double dt) |
| All the local interactions are finished, call finalize on each one, then call PhysicalObject::finalizeLocalInteractions. | |
| virtual void | doGlobalInteractions (World *w, double dt) |
| Do the global interactions, call step on each one. | |
| void | sortLocalInteractions (void) |
| Sort local interactions. Called by addLocalInteraction ; can be called by subclasses in case of interaction radius change. | |
Protected Attributes | |
| std::vector< LocalInteraction * > | localInteractions |
| Vector of local interactions. | |
| std::vector< GlobalInteraction * > | globalInteractions |
| Vector of global interactions. | |
 1.4.2
1.4.2